Welcome to My Project Files
Robotics is my passion. I first started tinkering when I was 14, with one of my earliest benchmarks being a massive K’nex Robotic Arm that sported hobby sensors and servos. From these humble beginnings, my intrigue has grown exponentially to keep pace with the fascinating realm of intelligent machines.
I.A.R.M. 3.0 (Interactive Autonomous Robotic Manipulator)
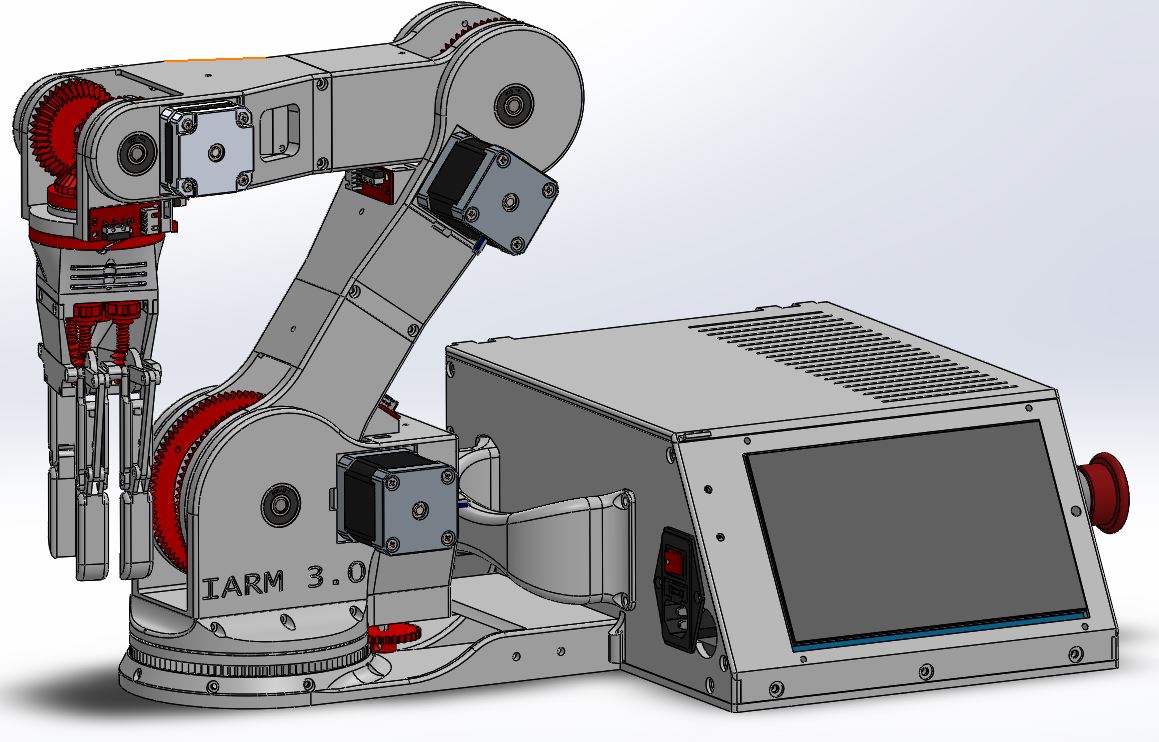 Behold! My first design fabricated entirely from 3D-printed parts. The end goal is to use computer vision and A.I. to play a real-world game of chess against a human opponent…and win! To accomplish this, IARM 3.0 boasts 5 degrees of freedom (DOF) powered by stepper motors. All necessary computer vision and artificial intelligence capabilities are handled by an NVIDIA Jetson Nano and OAK-D stereoscopic camera.
Behold! My first design fabricated entirely from 3D-printed parts. The end goal is to use computer vision and A.I. to play a real-world game of chess against a human opponent…and win! To accomplish this, IARM 3.0 boasts 5 degrees of freedom (DOF) powered by stepper motors. All necessary computer vision and artificial intelligence capabilities are handled by an NVIDIA Jetson Nano and OAK-D stereoscopic camera.
For position control, the robot kinematics are handled by the ROS MoveIt application which interfaces with the motor drivers through an Arduino Mega 2560. Check out my Youtube video for a quick introduction to the unique design.
Mobile Prototyping Platform

Behold! Combining real-time computer vision with mobile robotic systems turns out to be a real challenge. This miniature mobile robot serves as a prototyping platform for doing just that. A Raspberry Pi/Arduino setup allows for a conservative chassis and low power consumption, while a Picamera provides live video onboard image processing.
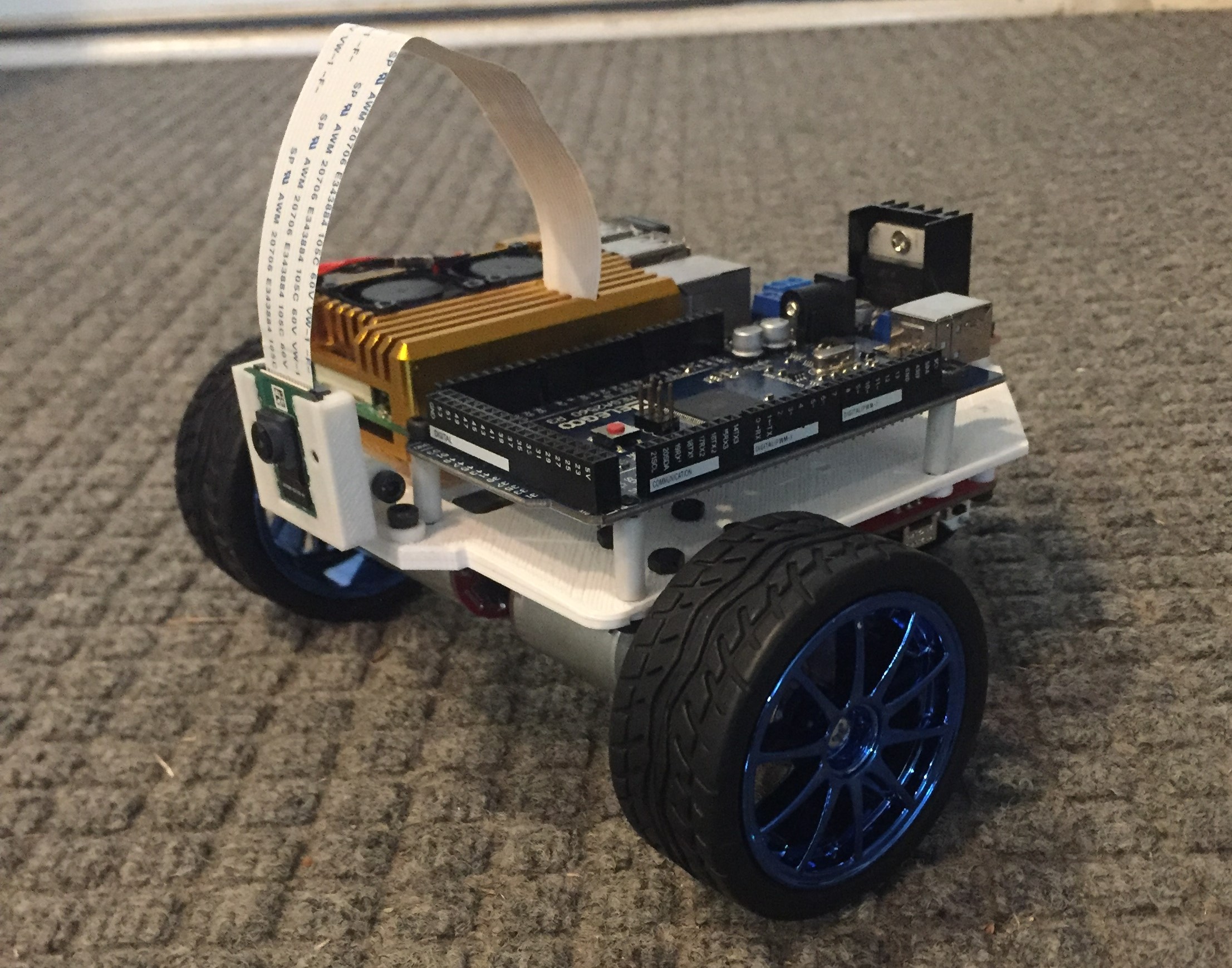
The primary motivation behind this design was to experiment with basic lane navigation techniques. By basic I mean entirely image-processing based; no advanced machine learning or neural networks here. Instead a plethora of basic OpenCV functions and the RANSAC algorithm were combined to allow the robot to identify lanes in a simple driving environment.